- TLS adalah
Menurut Lichti, dkk (2005) bahwa Terrestrial Laser Scanner (TLS) merupakan suatu peralatan penangkapan gambar (image) aktif yang secara cepat dapat memperoleh kumpulan dari titik–titik tiga dimensi dari suatu objek maupun permukaan.
Boehler, dkk (2002) menjelaskan bahwa terdapat dua jenis scanner berdasarkan prinsip pengoperasiannya, yaitu:
- Triangulation Scanners.
Terdiri dari single camera solution dan double camera solution.
- Ranging Scanners
2.1 Time of flight of a laser pulse. Laser dipancarkan ke objek selanjutnya jarak dihitung dari waktu perjalanan antara sinyal transmisi dan penerimaannya. Prinsip ini mempunyai akurasi rendah karena merupakan tipe scanner jarak jauh dengan cakupan 1,5 – 6.000 meter. Scanner jenis ini cepat dalam melakukan akuisisi data dan titik yang didapat hingga mencapai 11.000 – 122.000 titik setiap detiknya.
2.2 Phase comparison method. Metode ini juga sering dikenal melalui alat tacheometric. Laser yang dipancarkan dimodulasikan dengan gelombang harmonik dengan jarak yang dihitung dengan menggunakan perbedaan beda fase antara gelombang pancar dan gelombang yang diterima. Akurasi yang dihasilkan rendah karena merupakan tipe scanner jarak menengah. Akan tetapi, scanner jenis ini dapat mengukur hingga 1.000.000 titik setiap detiknya.
- Konsep Pengukuran Terrestrial Laser Scanner
Terrestrial Laser Scanner atau biasa disebut sebagai TLS adalah teknologi survei dan pemetaan dengan prinsip kerjanya adalah laser ditembakkan dari alat ke obyek kemudian akan dipantulkan kembali oleh permukaan maupun obyek ke alat. Intensitas dan waktu yang dibutuhkan oleh laser dari dipantulkan ke obyek hingga kembalinya laser tersebut ke alat akan dihitung untuk kemudian dianalisis dan diolah sehingga didapatkan point cloud yang selanjutnya dapat dimodelkan menjadi 3D (https://geodesi.ugm.ac.id/)
Scanner mengukur suatu objek sebagai point cloud. Dengan setiap point cloud merupakan jarak dari alat dan sudut horisontal/vertikal (Mendy, dkk 2011). Data yang direkam adalah data sudut horizontal (α), sudut vertikal (β), dan jarak antara pusat koordinat scanner dengan obyek yang direkam (R). Seperti dapat dilihat pada Gambar 1. bidang X dan Y dijadikan sebagai reference plane dalam koordinat scan. Laser bergerak dari atas ke bawah dan ke samping kanan scanner sesuai dengan arah perputaran jarum jam.
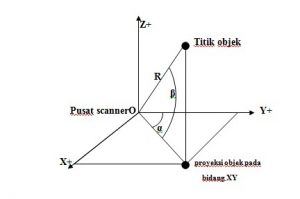
Prinsip Perekaman Data dengan Scanner (Handoko,2006)
Saat ini laser dikenal sebagai suatu alat yang dapat menghasilkan sebuah gelombang cahaya pada spektrum tertentu dengan sudut yang sangat sempit. Terdapat 5 ciri utama laser sehingga dimanfaatkan dalam pengukuran jarak, yaitu :
- Laser dihasilkan dalam bentuk satu sorotan cahaya linier dan merambat pada arah tertentu.
- Laser dapat merambat pada jarak yang sangat jauh dan fokus pada satu titik.
- Laser memiliki warna asli tertentu (merah, hijau, biru) yang dapat teramati oleh mata manusia, namun umumnya laser yang digunakan pada instrument pengukuran jarak memiliki panjang gelombang 1064 nm (near infrared).
- Cahaya laser tidak bersifiat kontinyu, namun merambat dalam bentuk pulsa-pulsa pendek atau sangat pendek. Sebagai konsekuensinya, dapat menghasilkan energy yang sangat tinggi.
- Laser memiliki cepat rambat yang konstan pada medium tertentu.
Reflektansi atau interaksi antara laser dengan objek terbagi menjadi specular yaitu pantulan cahaya laser pada satu arah tertentu dan diffuse dimana cahaya laser dipantulkan ke berbagai arah dengan intensitas sangat rendah karena terbagi kedalam masing-masing pantulan.

Kedua jenis pantulan ini sangat bergantung dari karakteristik permukaan objek. Reflefansi pada laser bersisfat koheren sedangkan cahaya lainnya seperti matahari tidak koheren.
Laser baik yang bersumber dari gas, solid-state atau semiconductor, bersifat monokromatik memancarkan cahaya dengan arah tertentu. Pantulan yang dihasilkan target umumnya bersifat diffuse sehingga menghasilkan banyak noise. Kekuatan sinyal pantul yang diterima kembali oleh sensor (rangefinder) akan lebih rendah dibandingkan kekuatan yang dipancarkan oleh transmitter. Energi yang dirambatkan akan berkurang akibat pengaruh atmosfer dan akibat hasil interaksi dengan target. Pantulan dan noise ini kemudian diterima oleh suatu sensor atau photodetection. Dalam perkembangan dibidang sensor, telah dihasilkan sensor yang dapat mengeliminasi noise tersebut.
- Klasifikasi TLS
- Statistik TLS, Statik TLS merupakan jenis akuisisi objek topografi pada area disekeliling instrument yang ditempatkan pada posisi tetap. Instrumen ini bekerja dengan cara mengukur jarak miring, sudut horizontal, sudut vertikal suatu objek secara simultan dan otomatis. Sebelum proses pemindaian, umumnya perubahan sudut horizontal dan vertikal dapat diatur sesuai dengan sampling yang diinginkan dalam sisitem koordinat polar. Menurut Staiger (2003), statik TLS dapat diklasifikasikan menjadi 3 jenis yaitu :
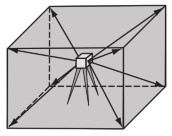
1.1 Panoramic scanner (a), jenis ini memindai jarak dan sudut yang mencakup 360° pada bidang horizontal dan 180 derajat pada bidang vertikal. Sehingga area yang tercover adalah serluruh objek disekitar instrumen kecuali, bagian bawah tempat berdiri instrumen.
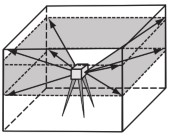
1.2 Hybrid scanners, jenis ini mencakup 360° pada bidang horizontal, sedangkan untuk bidang vertikal dibatasi hanya 50° sampai 60°.
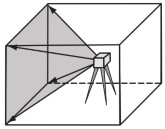
1.3 Camera scanner, memindai jarak dan sudut cakupan bidang horizontal dan vertikal yang terendah yaitu 40 bidang horizontal dan 40 derajat bidang vertikal, sama dengan cakupan kamera fotografi.
Apabla diklasifikasin berdasarkan jarak jangkauan objek yang dapat direkam, TLS dapat dibagi menjadi 3 jenis yaitu:
- Short range, dengan jangkauan 50-100m



(a) (b) (c)
Contoh produk TLS dengan jangkauan dekat (a) Zoller + Frohlich, (b) Faro, dan (c) Basis Software Inc
- Medium range, dengan jangkauan 150-350m



(a) (b) (c)
Contoh produk TLS dengan jangkauan sedang, (a) Leica Geosystems, (b) Trimble, dan (c) Topcon
- Long range, dengan jangkauan hingga 1000m



(a) (b) (c)
Contoh produk TLS dengan jangkauan jauh, (a) Opech, (b) Riegl, dan (c) I-SiTE
- Dinamik TLS
Dinamik TLS merupakan instrumen akuisisi objek topografi pada area disekeliling instrumen yang ditempatkan pada platform yang bergerak. Dinamik TLS sebagai bagian dari mobil mapping system memerlukan GPS/IMU sebagai komponen utama untuk memperoleh koordinat titik-titik sampel yang tergeoreferensi. Persoalan utama teknik ini adalah apabila dilakukan pemataan pada kawasan perkotaan padat, dimana sinyal GPS dapat terganggu baik akibat interupsi sinyal lain maupun efek multipath. Hingga kini, mobile mapping system yang pada awalnya hanya menggunakan komponen utama TLS, sekarang telah dikombinasikan dengan video dan foto digital bergeoreferensi yang juga dikumpulkan selama proses akuisisi data.
- Prinsip Penentuan Jarak pada TLS
- Time of Flight (Mid & Long Range)
Kecepetan rambat cahaya pada ruang vakum saat ini tepatnya 299.792.458 m/s, sehingga apabila cahayaa merambat pada udara harus diberikan koreksi bergantung dengan densitas udara. Terkait dengan kecepatan cahaya tersebut menunjukkan bahwa dibutuhkan waktu 3.33 nanoseconds untuk bergerak 1 m. Dengan demikian, untuk memperoleh akurasi 1 mm, harus dapat mengukur selang waktu sekitar 3.33 picoseconds. Untuk mid & long range TLS umumnya dapat mencapai akurasi sekitar 6 – 10 mm. (1/1)
Scanner berbasis metode ini tidak menggunakan sinar laser kontinyu, namun berbasis pulsa. Keuntangan dari penggunaan pulsa ialah tingginya konsentrasi energi yang dipancarkan. Energi ini membuat SNR (signal to noise ratio) sangat tinggi sehingga meningkatkan akurasi pengukuran terutama untuk jarak jauh.
- Phase (Short Range)
Prinsip lain yang berupaya menghindari penggunaan jam dengan tingkat presisi tinggi adalah dengan memodulasi sinyal laser modulasi berbasis sinyal sinusoidal, amplitudo atau frekuensi, dan pseudo-noise atau polarisasi. Sinyal pantulan yang diterima kemudian didemodulasi untuk dibandingkan dengan sinyal yang ditransmisikan sehingga dapat diperoleh nilai perbedaan fase nya.
Dari nilai beda fase kemudian dapat dihitung selang waktunya sehingga diperoleh nilai jarak dari instrumen ke target. Akurasi dari metode ini dapat mencapai 0.5 mm. Metode ini umumnya memiliki keuntungan dalam kecepatan akusisi data dan akurasinya namun meiliki kepresisian lebih rendah dibandingkan berbasis selang waktu. Hal ini diakibatkan oleh kepresisian metode ini sangat bergantung dengan frekuensi sinyal, stabilitas dari osilator, kekuatan sinyal pantul dan noise.
- Triangulation (Very Short Range Less Than 10m)
Dalam aplikasinya pada LS terdapat keterbatasan panjang baseline pada metode ini sehingga metode ini biasa diaplikasikan pada LS dengan jangkauan kurang dari 10. Namun dibandingkan dengan metode berbasih perhitungan waktu, metode ini memiliki akurasi dalam yang sangat tinggi yaitu dalam skala mikron.
- Prinsip Penentuan Posisi pada TLS
- Penentuan Posisi Horiontal (Metode Polar)
Dalam pembahasan ini, yang akan diuraikan adalah metoda polar, tanpa merincikan pengguna-an peralatan yang digunakan dalam pengukurannya. Pembahasan ditekankan pada prinsip dasar metoda disertai pengolahan data untuk mendapatkan posisi horizontal obyek (titik).
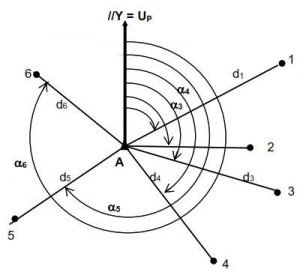
Keterangan :
Titik A = titik yang diketahui koordinatnya (titik ikat)
Α = azimuth/sudut jurusan dari A ke titik i
d = jarak mendatar dari A ke titik i
Posisi titik sekeliling titik A diukur dari titik A. Obyek ukuran adalah arah dan jarak datar dari titik A ke titik yang dimaksud (target). Mengingat titik A sebagai pusat titik lainnya, maka titik A dapat dikatakan sebagai titik kutub (pole). Hitungan koordinat titik lainnya (titik 1, 2, ….. , 6, … ), dapat menerapkan persamaan diatas, dengan penurunan persamaan tersebut sebagai di bawah.
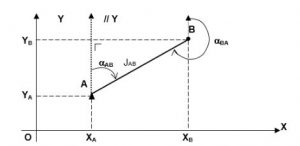
Dari segi-tiga siku yang terbentuk, dapat dilihat bahwa :
- Beda absis antara titik A sampai dengan titik B : αXAB = XB – XA
- Beda ordinat antara titik A sampai dengan titik B : αYAB = YB – YA
- Bila sudut jurusan/azimuth dari A ke B = αAB
MAKA
- Sin αAB = (∆XAB / DAB) à ∆XAB = DAB Sin αAB
- Cos αAB = (∆YAB / DAB) à ∆YAB = DAB Sin αAB
JADI
∆XAB = XB – XA = DAB Sin αAB
XB = XA + DAB Sin αAB
∆YAB = YB – YA = DAB Sin αAB
YB = YA + DAB Cos αAB
SECARA UMUM, DITULISKAN SEBAGAI BERIKUT:
XB = XA + DAB Sin αAB
YB = YA + DAB Cos αAB
2. Penetuan Posisi Vertikal (Metode Trigonometrik)
Metoda trigonometrik, menerapkan hitungan segi-tiga siku bidang datar vertikal. Bila dinyatakan dalam sistem koordinat Cartesius, bidang datar vertikal ini adalah bidang yang tegak lurus (∟) bidang X-O-Y dan melalui garis bidik alat ukur. Parameter ukuran dalam metoda ini adalah jarak dan sudut. Mengingat masalah utama adalah posisi vertikal suatu titik, maka sudut yang diukur adalah sudut vertikal.
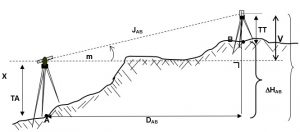
Keterangan :
TA = tinggi alat dari titik A
TT = tinggi target dari titik B
M = sudut miring
JAB = jarak miring A-B
DAB = jarak mendatar A-B
V = sisi tegak segi-tiga siku
∆HAB = beda tinggi A-B
Dari segi-tiga siku, dapat dihitung besar V, yaitu :
V = JAB Sin m ; atau
V = DAB Tan m
Jarak vertikal dari titik tertinggi pada gambar (target) sampai dengan garis terbawah (garis mendatar melalui titik A), dapat dinyatakan panjangnya, yaitu sebesar :
X = ∆HAB + TT = V + TA, sehingga:
∆HAB = V + TA – TT
Dengan harga V sebesar :
Untuk jarak miring : V = JAB Sin m
Untuk jarak mendatar : V = DAB Tan m
3. Mekanisme Pemindaian
Akuisisi sampel permukaan objek dengan laser tentunya membutuhkan mekanisme pemindaian untuk memindahkan arah laser ke seluruh bagian permukaan objek
- Sumber Kesalahan TLS
- Kesalahan Instrumen
- Kesalahan footprint, yaitu kesalahan posisi akibat footprint laser sekitar ¼ dari diameter footprint
- Kesalahan jangkauan, yaitu kesalahan ketidakpastian jaraj yang dihasilkan oleh mid&long TLS 5-50mm. umumnya diakibatkan kesalahan waktu
- Kesalahan sudut, yaitu kesalahan yang diakibatkan oleh mirror dan alat pengukuran sudut
- Kesalahan akibat toleransi perakitan dimana sumbu-sumbu tidak lurus secara sempurna sehingga menghasilkan kesalahan kolimasi dan subu horizontal
- Kesalahan Objek
- Sudut dating sinar laser, Idealnya besar sudut datang dan sudut pantul sinyal laser mendekati 90° karena sudut datang yang terlalu rendah akan menyebabkan sudut pantul terlalu tinggi sehingga sinyal pantul tidak kembali ke instrumen
- Warna objek, Objek berwarna hitam akan menyebabkan absorbsi sinyal yang tinggi sehingga sinyal pantul yang diterima akan lemah bahkan tidak ada
- Permukaan lambert, Jika karakteristik permukaan objek menyebabkan absorbsi sinyal tinggi maka sinyal yang diterima akan lemah dan dapat dianggap noise. Sedangkan apabila permukaan objek memiliki reflektivitas sangat tinggi (metal) makan laser akan sepenuhnya dipantulkan pada arah lain
- Refleksi ganda, Material yang bersifat semi-transparan dapat menyebabkan refleksi ganda sehingga terdapat penambahan jarak yang diperoleh.
- Kesalahan tepi, Sinyal pantulan pada batas objek akan diterima 2x karena dari posisi yang berbeda, sehingga yang diperoleh merupakan nilai reratanya.
- Kesalahan Kondisi Lingkungan
- Temperatur
- Atmosfer
- Gangguan radiasi
- Distorsi gerakan
- Kesalahan Metodologi, Kesalahan dalam memilih metode survey. Contohnya apabila pengguna menentukan resolusi yang lebih tinggi daripada akurasi per titik dari TLS. Pemindaian akan memperoleh sampel berlebih. Sampel berlebih ini akan menghasilkan noise yang juga berlebih sehingga membutuhkan waktu pemrosesan yang jauh lebih lama
- Registrasi Data
Registrasi merupakan proses penggabungan data hasil perekaman yang didapat dari beberapa scanworld (titik berdiri alat) sehingga terletak dalam satu sistem koordinat (Jacob, 2005 dalam Parana, 2012). Metode registrasi yang digunakan dalam pengolahan TLS dalam penelitian ini adalah Multi Station Adjustment. Prinsip dasar dari metode ini adalah penggabungan data dari dua atau lebih posisi (scanworld) terhadap titik ̶ titik data yang secara otomatis akan menemukan titik ̶ titik data yang sama berdasarkan titik terdekat menggunakan proses adjustment. Algoritma dalam metode ini adalah Iterative Closest Point (ICP).
- Metode target to target
Pada metode target to target titik ikat yang digunakan untuk registrasi adalah titik target yang dipasang disekitar objek dan diidentifikasi pada saat perekaman data. Target berbentuk beraneka ragam ada yang berbentuk target bola yang mana bahannya terbuat dari bahan khusus kemudian target lainnya berupa target planar hitam putih atau planar yang berwarna biru putih. Target diletakkan secara merata dari berbagai posisi atau diletakkan pada cakupan scanner yang bisa terlihat dari berbagai arah tempat berdiri scanner. Kemudian dilakukan identifikasi untuk titik target tersebut. Untuk persebaran target yang merata dan banyak akan memberikan kualitas registrasi yang lebih baik dari pada metode cloud to cloud. Sehingga untuk metode target base ini, maka minimal titik target pada obyek yang saling terlihat antara scanword yang berdekatan harus minimal 3 titik target. Hal ini dikarenakan pada sistem transformasi koordinat 3D terdapat 7 parameter.
- Metode cloud to cloud
Metode cloud to cloud, t itik ikat yang digunakan untuk registrasi didapat dari titik – titik objek hasil perekaman sehingga pada saat perekaman target tidak perlu pemasangan target. Syarat agar scanworld dapat diregistrasi, maka antar scanworld harus memiliki pertampalan minimum sebesar 20 % dari daerah yang direkam. Kelebihan metode cloud to cloud adalah apabila hasil registrasi memiliki ketelitian yang kurang maka data diulang lagi dengan menggunakan titik ikat yang lain tanpa harus melakukan pengukuran kembali. Selain itu dengan registrasi metode cloud to cloud maka lebih efisien dalam hal waktu dan biaya, karena pada saat melakukan pengukuran tidak memerlukan identifikasi target sehingga waktu yang dibutuhkan lebih singkat. Kekurangan untuk metode ini kualitas registrasinya paling rendah dibanding dengan metode lainnya. Dalam registrasi metode cloud to cloud, registrasi dapat dilakukan dengan 2 cara yaitu registrasi secara bertahap dan registrasi secara keseluruhan. Dalam registrasi secara bertahap, registrasi scanworld dilakukan dalam beberapa tahap registrasi. Dalam registrasi secara keseluruhan, semua scanworld diregistrasi dalam satu kali tahapan registrasi.
- Metode kombinasi antara metode Clouds to Clouds dengan Target to Target.
Metode kombinasi antara metode Clouds to Clouds dengan Target to Target, yaitu suatu metode dengan proses registrasi yang dilakukan secara kombinasi yaitu antara cloud to cloud dengan target to target. Sehingga untuk kualitas hasil registrasi dan ukurannya untuk metode ini memiliki kualitas yang lebih baik dibanding dengan cloud to cloud maupun target to target.
Daftar Pustaka dan sumber:
Fauzi, A. I. (2018). GD5201 Metodologi Pemetaan Terrestrial Laser Scanner (TLS). GD5201 Metodologi Pemetaan Terrestrial Laser Scanner (TLS), 1-10.
Pitto Yuniar Maharsayanto, dkk. (2013). Aplikasi Terrestrial Laser Scanner Untuk Permodelan Tampak Muka Bangunan (Studi Kasus: Gedung PT. Almega Geosystems Kelapa Gading-Jakarta). Aplikasi Terrestrial Laser Scanner Untuk Permodelan Tampak Muka Bangunan (Studi Kasus: Gedung PT. Almega Geosystems Kelapa Gading-Jakarta), 1-13
https://ejournal3.undip.ac.id/index.php/geodesi/article/view/2222
https://www.academia.edu/36528631/Terrestrial_Laser_Scanning
DAFTAR SEKARANG!!
Training Center di Yogyakarta
Contact us
1. Dwi Purwanto
085602006858 (m3)
081328361414 (simpati)
Email: fetc.trainingcenter@gmail.com
admin@frastatraining.com
2. Kurnia
08179414410 (xl)
Email: kurniafrasta@gmail.com
FETC,Ruko house of Tajem no A 1 JL Raya Tajem km 2 Panjen Wedomartani Ngemplak Sleman Yogyakarta,
Telp 0274 4462970
OUR SOCIAL MEDIA
mau lanjut WA langsung??
Materi Selengkapnya Click Di Sini
Informasi Pelatihan Selengkapnya Click Di Sini
#hidrografi
#pelatihanhidrografi
#pelatihanpemetaanindonesia
#SurveyorIndonesia
#surveying #mining #surveyor #fetc
#training #pelatihan #belajargps
#belajaruav #belajarsurvey
#pertambangan #surveyortambang
#juruukur #trainingpemetaanindonesia
#pelatihansurveydanpemetaan
#pelatihanpemetaan
#kursussurveydanpemetaan
#materisurveypemetaan
#pelatihanjuruukursurveypemetaan
#surveypemetaan
#geolistrik
#geolistrikonline
#pelatihangeolistrik
#pelatihangeolistrikonline
#geofisika
#mencariairtanah

