- LiDAR
LiDAR merupakan singkatan dari Light Detection and Ranging, yaitu teknologi penginderaan jauh (remote sensing) terkini dalam menyediakan data pengukuran elevasi dengan cepat dan akurat. Sistem LiDAR dapat melakukan pengukuran mencapai 40 km dalam sehari dengan ketelitian horisontal dan vertikal masing-masing adalah 30 cm dan 15 cm. Resolusi DEM yang dihasilkan menggunakan data LiDAR berkisar antara 20 – 100 cm (Shamsi, 2005 dalam Al Amin, 2015). Pengumpulan data LiDAR dilakukan menggunakan pesawat yang menembakkan gelombang aktif ke permukaan bumi, dimana gelombang tersebut akan kembali setelah mengenai objek-objek di permukaan bumi. Setiap objek-objek yang memantulkan gelombang tersebut akan menghasilkan titik-titik dengan nilai koordinat x, y dan z yang direkam secara kontinyu menggunakan komputer (Johnson, 2009 dalam Al Amin, 2015). Gambar 1 di bawah ini menunjukkan ilustrasi proses perekaman data LiDAR.
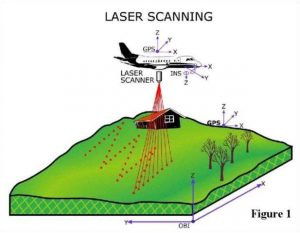
Gambar 1, Ilustrasi proses perekaman data LiDAR
LiDAR (Light Detection and Ranging) adalah sebuah teknologi sensor jarak jauh menggunakan laser cahaya kontinyu yang dipancarkan secara menyebar dari sebuah transmitter (pemancar) untuk menemukan jarak suatu objek (Smith, 2008 dalam Marwati, A. dkk., 2018). Metode untuk menentukan jarak suatu obyek adalah dengan menggunakan pulsa laser.
LiDAR menggunakan cahaya inframerah, ultraviolet, tampak, atau dekat dengan objek gambar dan dapat digunakan untuk berbagai sasaran, termasuk benda-benda non-logam, batu, hujan, senyawa kimia, aerosol, awan dan bahkan molekul tunggal. Sebuah sinar laser dapat digunakan untuk memperoleh fitur peta fisik dengan resolusi sangat tinggi. LIDAR telah digunakan secara luas untuk penelitian atmosfer danmeteorologi. Instrumen LIDAR dipasang ke pesawat dan satelit yang digunakan untuk survei dan pemetaan.
LiDAR, Light detection and ranging atau yang dikenal dengan nama Lidar adalah suatu teknologi yang memanfaatkan sinar laser untuk dapat menghitung jarak suatu objek. Teknologi lidar ini adalah metode yang paling efektif untuk digunakan sebagai pengambilan data jarak suatu objek (Alamsyah dkk, 2019).
LiDAR, (Light detection and ranging) adalah sebuah teknologi sensor jarak jauh menggunakan properti cahaya yang tersebar untuk menemukan jarak dan informasi suatu objek dari target yang dituju (Fikri, M. dkk., 2019).
- Prinsip Kerja LiDAR
Prinsip kerja LiDAR secaara umum adalah sensor memancarkan sinar laser pada target kemudian sinar tersebut dipantulkan kembali ke sensor. Berkas sinar yang ditangkap kemudian dianalisis oleh peralatan detector. Perubahan komposisi cahaya yang diterima dari sebuah target ditetapkan sebagai sebah karakter objek. Waktu perjalanan sinar yang dipancarkan dan diterima kembali diperlukan sebagai variabel penentu perhitungan jarak dari benda ke sensor. Untuk mendapatkan gambar, dilakukan penyiaman pada lokasi yang ditentukan. Penyiaman dilakukan dengan memasang laser scanner, GPS dam INS pada wahana yang dipilih berdasarkan skala produk yang diinginkan dan luas cakupan, maka ditentukan jalur terbang. Pada jalur terbang yang telah ditentukan tersebut wahana terbang melakukan penyiaman (scanning). Pada saat laser scanner melakukan penyiaman sepanjang jalur terbang pada setiap interval waktu tertentu direkam posisinya dengan menggunakan GPS dan orientasinya dengan menggunakan INS. Proses ini dilakukan sampai jalur yang disiam selesai (Marwati, A. dkk., 2018).
Berdasarkan metode pengukuran jarak LIDAR dibagi menjadi dua bagian, pertama triangulasi. Cara kerja LIDAR triangulasi yaitu memanfaatkan perhitungan persamaan segitiga. Laser memancarkan laser inframerah yang kemudian dipantulkan oleh objek yang dideteksi. Cahaya melewati lensa lubang jarum dan mengenai sensor kamera CCD. Ini berarti bahwa jarak ke objek sebanding dengan sudut cahaya yang dipantulkan, dan dapat memperkirakan jarak aktual menggunakan konsep persamaan trigonometri segitiga. Kedua Time of Flight (ToF). Cara kerja LIDAR Tof dengan memancarkan sinar laser terhadap objek dan kemudian pantulan dari sinar tersebut akan diterima oleh receiver. Waktu tempuh sejak sinar dipancarkan sampai diterima kembali akan menjadi pembagi dari kecepatan cahaya. Perbandingan antara kecepatan cahaya dan waktu akan menghasilkan data jarak (Fikri, M. dkk., 2019)
Untuk LiDAR jenis TF mini LiDAR seperti yang ditunjukkan pada Gambar 2, data hasil pembacaan jarak dari LiDAR ini dikirimkan dengan cara komunikasi serial pada mikrokontroler. Pada prinsip kerjanya, LiDAR TF Mini menghitung jarak benda berdasarkan ToF (Time of Flight). LiDAR akan mentransmisikan gelombang laser (Light Amplication by stimulated emission of radiation). Laser adalah instrument yang dapat menghasilkan energi radiasi yang kuat berupa emisi cahaya dengan cara mengalirkan arus kuat pada material penghasil cahaya seperti carbon dioxide, heliumneon, argon, rubies, ataupun material lain. Gelombang laser yang dihasilkan akan termodulasi pada suatu periode waktu tertentu, dimana gelombang tersebut akan merefleksikan cahaya setelah mengenai suatu benda, ditunjukkan pada Gambar 3. LiDAR akan menghitung waktu dengan cara menghitung perbedaan sudut kedatangan cahaya dan kemudian menghitung jarak relatif antara LiDAR dan benda (Alamsyah. dkk., 2019.

Gambar 2, LiDAR TF Mini
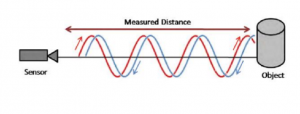
Gambar 3, Cahaya setelah mengenai suatu benda
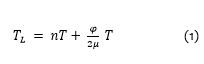
Persamaan (1) adalah persamaan untuk menghitung time of travel (TL) berdasarkan beda fasa yang di dapat antara gelombang transmisi dan gelombang pantul, diimana n adalah jumlah gelombang penuh, T adalah waktu tempuh cahaya untuk menempuh satu panjang gelombang dan φ adalah beda fasa.
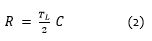
Setelah mengetahui time of travel (TL) maka selanjutnya dapat mencari Range (jarak). Persamaan (2) adalah persamaan untuk mencari jarak berdasarkan nilai TL yang sudah di ketahui. Dimana c adalah kecepatan cahaya pada medium antara LiDAR dan benda yang akan di ukur jaraknya.
- Daftar Pustaka:
Al Amin, M. B. (2015). Pemanfaatan Teknologi LiDAR dalam Analisis Genangan Banir akibat Luapan Sungai Berdasarkan Simulasi Mode Hidrodinamik. Info Teknik, 22-23.
Alamsyah, S. A. (2019). Implementasi Lidar Sebagai Kontrol Ketinggian Quadcopter. Jurnal Teknik Pomits, 1-2.
Fikri, M. d. (2019). Sistem Penghindar Halangan Dengan Metode LiDAR Pada Unmanned Surface Vehicle. Jurnal Teknik ITS, 1-2.
Marwati, A. d. (2018). Analisis Perbandingan Klasifikasi Y=Tutupan Lahan Kombinasi Data Point Cloud LiDAR dan Foto Udara Berbasis Metode Segmentasi dan Supervised (Studi Kasus: Tanggamus Lampung). Jurnal Geodesi Undip, 38-39
Johnson, L.E., 2009, Geographic Information Systems in Water Resources Engineering, CRC Press, Florida
Shamsi, U.M., 2005, GIS Applications for Water, Wastewater, and Stormwater System, CRC Press, Florida.
Smith, A.M.S., 2008. Production of vegetation spatialstructure maps by per-object analysis of juniper encroachment in multitemporal aerial photographs. Canadian Journal of Remote Sensing, Vol. 34, No. S2, pp. S268–S285
DAFTAR SEKARANG!!
Training Center di Yogyakarta
Contact us
1. Dwi Purwanto
085602006858 (m3)
081328361414 (simpati)
Email: fetc.trainingcenter@gmail.com
admin@frastatraining.com
2. Kurnia
08179414410 (xl)
Email: kurniafrasta@gmail.com
FETC,Ruko house of Tajem no A 1 JL Raya Tajem km 2 Panjen Wedomartani Ngemplak Sleman Yogyakarta,
Telp 0274 4462970
OUR SOCIAL MEDIA
mau lanjut WA langsung??
Materi Selengkapnya Click Di Sini
Informasi Pelatihan Selengkapnya Click Di Sini
#hidrografi
#pelatihanhidrografi
#pelatihanpemetaanindonesia
#SurveyorIndonesia
#surveying #mining #surveyor #fetc
#training #pelatihan #belajargps
#belajaruav #belajarsurvey
#pertambangan #surveyortambang
#juruukur #trainingpemetaanindonesia
#pelatihansurveydanpemetaan
#pelatihanpemetaan
#kursussurveydanpemetaan
#materisurveypemetaan
#pelatihanjuruukursurveypemetaan
#surveypemetaan
#geolistrik
#geolistrikonline
#pelatihangeolistrik
#pelatihangeolistrikonline
#geofisika
#mencariairtanah




